Jetson NanoでFPVラジコンを作る(4)
今回はJetson Nanoでタミヤのラジコンカーを制御するにあたり、そもそもラジコンカーとはどのようなシステムなのかを調べてみることにする。
前回記事
Jetson NanoでFPVラジコンを作る(1) - 自由課題
Jetson NanoでFPVラジコンを作る(2) - 自由課題
Jetson NanoでFPVラジコンを作る(3) - 自由課題
タミヤ公式のシステム解説は以下。
それなりにざっくりだが、システムの構成要素の説明としてはわかりやすい。以下のブロック図(上記サイトから引用)が主な構成を表している。

つまり、システム全体への電源供給と駆動輪を回転させるモーターの制御はスピードコントローラ(通称ESC)という装置が制御を行い、受信機は送信機からの信号の受信とESCへの制御信号転送、及びステアリングサーボの制御を行うということらしい。
なお、現在使用しているランチボックスは後輪駆動で、ステアリングサーボは前輪に接続されている。
もう少し電気的な仕様まで含んだ説明としては、英文だが以下も参考になった。
次はラジコンカーの制御信号の具体的な仕様について。
上記サイトにも少しだけ触れられているが、詳細には以下がわかりやすかった。(波形の画像はサイトから引用)
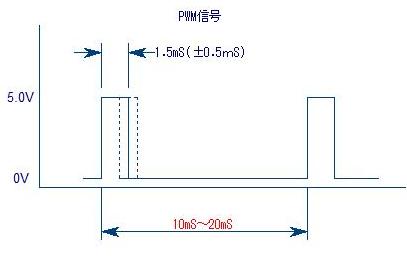
LEDの光量を制御するようなシンプルなPWMとは違い、ステアリングサーボの左右回転や駆動モーターの正逆回転*1を実現する必要がある。そのため基準のパルス幅が決まっており、設定したパルス幅と基準パルス幅の大小関係及び差の量で回転方向と回転量が決まる。また、3線で電源は5V、信号線は3.3Vとのこと。
また、タミヤのシステムの場合どのような波形になっているかというのが以下のサイトに書かれている。
これによると、ステアリングサーボ・ESCともに17.5ms周期で1.5±0.5msのパルスを入力すれば良いらしい*2。
今回は電波の干渉を避けるためラジコンの送受信器は使用しないので、送受信器周りを詳しく調べる必要はない。なのでこれくらいの情報があれば大丈夫なはずだ。
次回はJetson経由でステアリングサーボと駆動輪のモーター制御を試してみる。
(追記)次回記事 : Jetson Nanoを使ってFPVラジコンを作る(5) - 自由課題